THOLUS - Peripherie
Damit Tholus seinen dienst tun kann, ist es erforderlich die Blickrichtung des Teleskops und der Kuppel zu kennen um dementsprechend den Kuppelmotor zu steuern.Montierung
SynScan
 Verbindung zur Teleskopsteuerung SynScan von Skywatcher.
Verbindung zur Teleskopsteuerung SynScan von Skywatcher.SynScan bietet eine RS232 Schnittstelle.
Beispieleinstellungen für tholus.ini:
[controller]
ControllerType = SynScan
SerialPort = /dev/ttyUSB0
ControllerType = SynScan
SerialPort = /dev/ttyUSB0
Kuppelkontrolle
Arduino
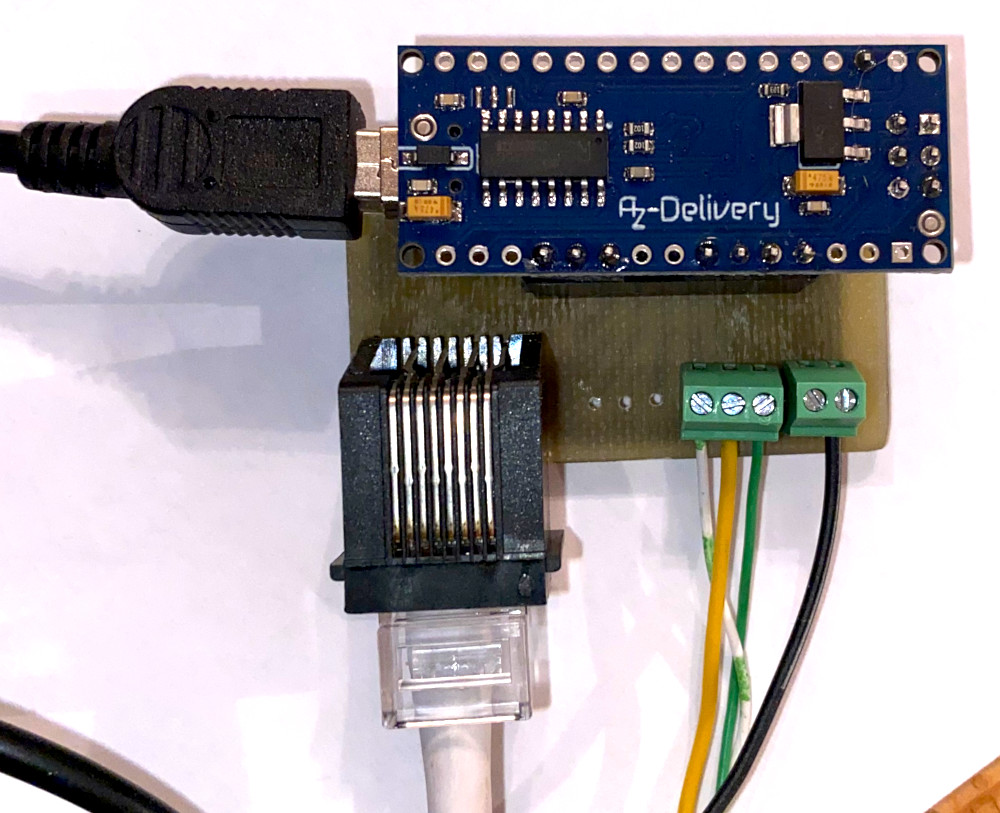
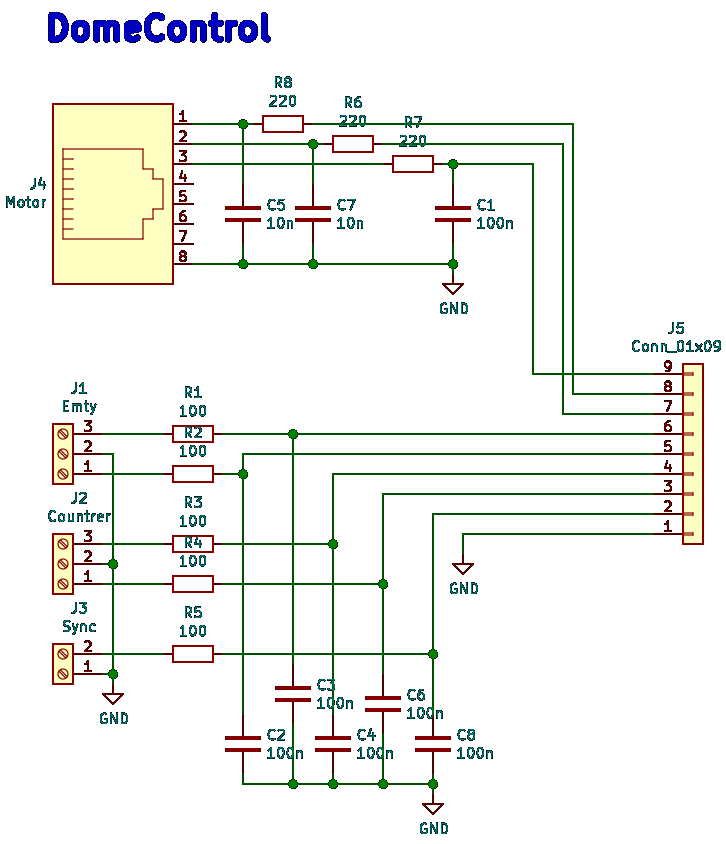

Motorantrieb
Zur Ansteuerung einer Motorsteuersoftware gibt es für Ausgänge. DR und DL
manuelle Kuppelbetätigung
Wird der Eingang MAN mit GND verbunden bedeutet dies, dass die Kuppel manuell bewegt wurde.
Tholus beendet daraufhin die automatische Nachführung der Kuppel.Sensor für Kuppelposition
Über die Eingänge DEA, DEB und DES wird die Position der Kuppel ermittelt.
Die Eingänge werden durch Verbindung mit GND aktiviert.DES: Synchronisationsposition - Parameter AzimutSync
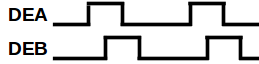 DEA und DEB: Impulssensoren zur Ermittlung der Kuppelposition.
Die beiden Eingänge müssen sich überschneidende Impulse liefern um die Drehrichtung ermitteln zu können.
DEA und DEB: Impulssensoren zur Ermittlung der Kuppelposition.
Die beiden Eingänge müssen sich überschneidende Impulse liefern um die Drehrichtung ermitteln zu können.
Kuppelschalter
Über ein Bluetoothmodul können Licht und Kuppelspalt mit Tholus gesteuert werden.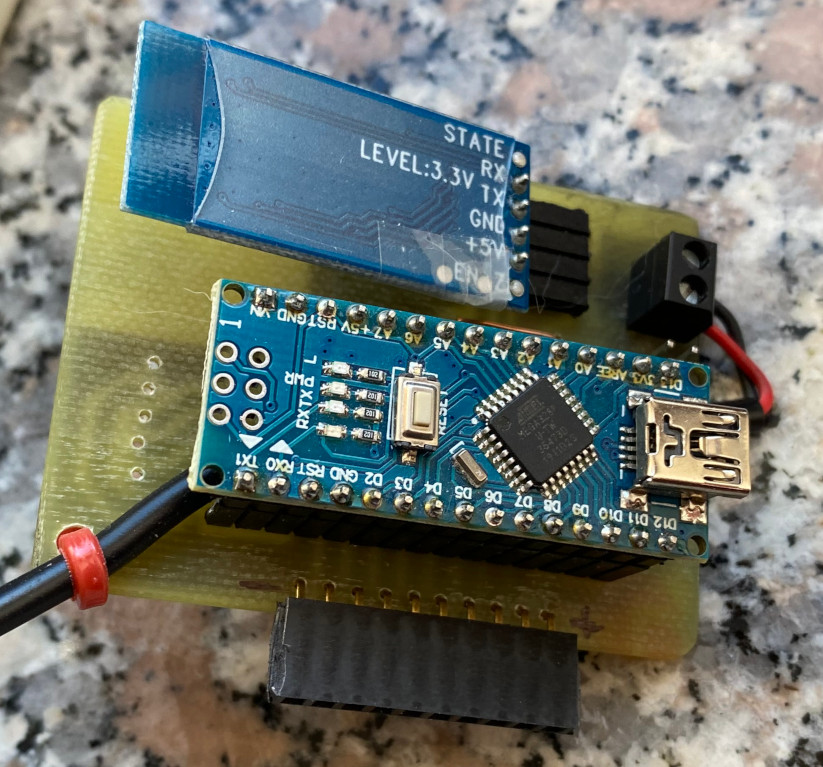
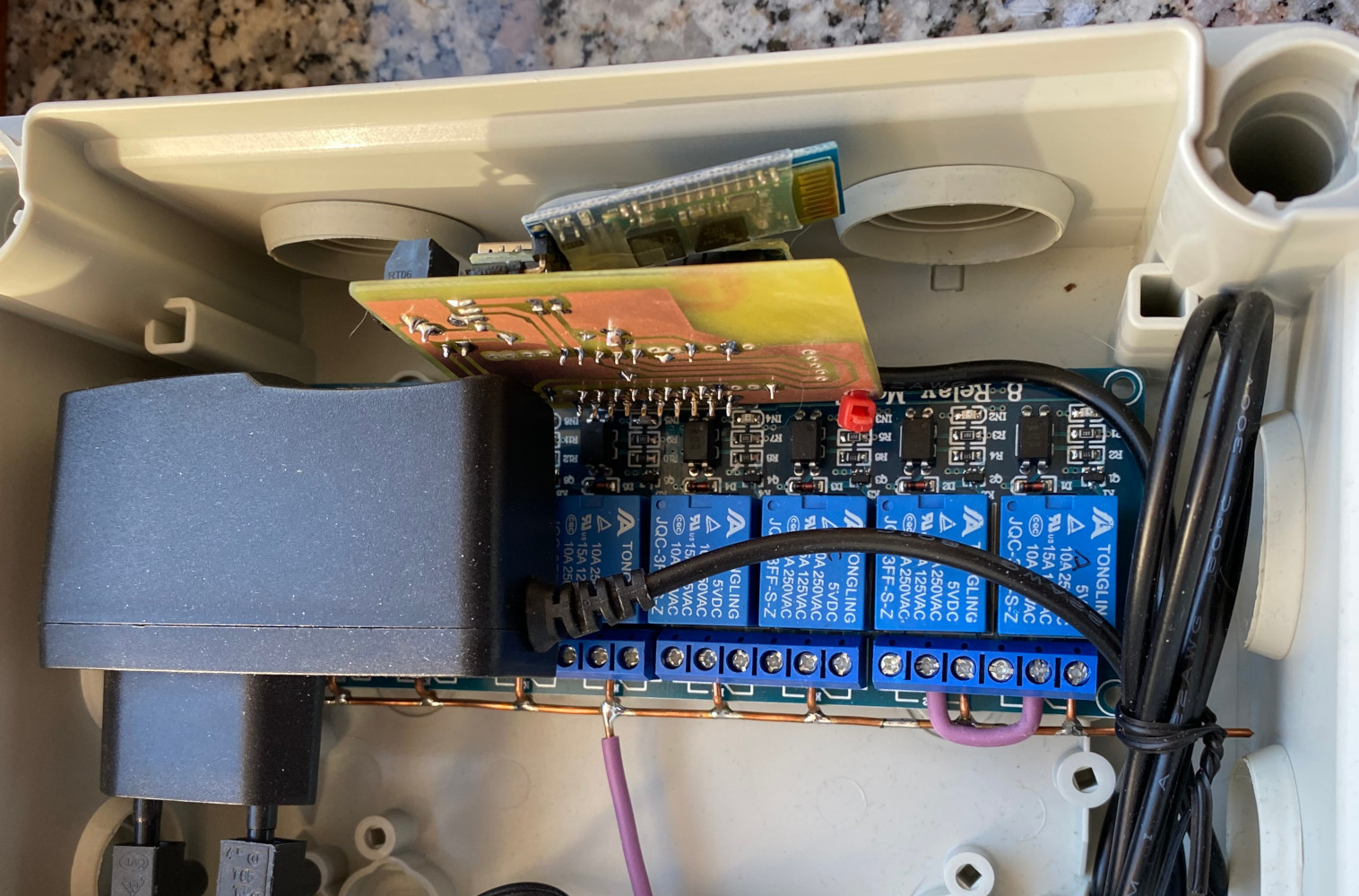
Komponenten:
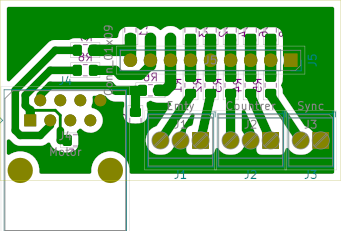
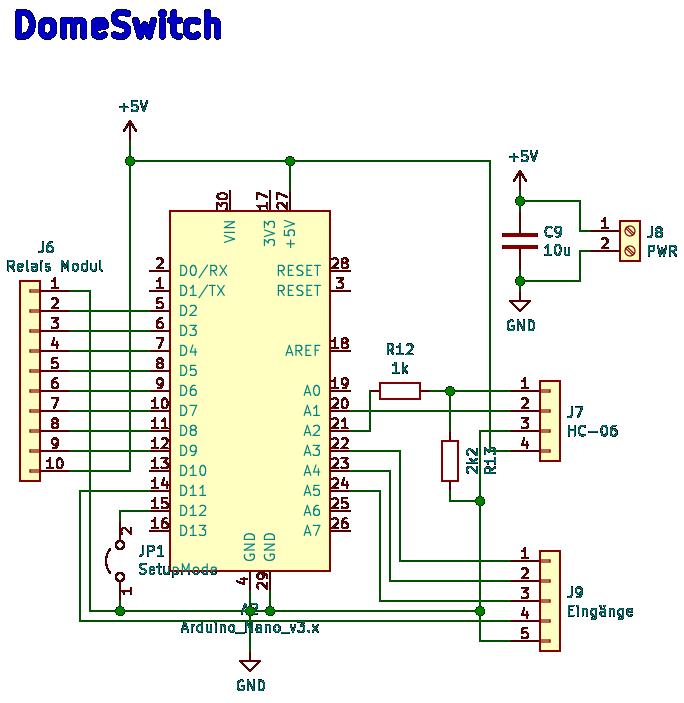
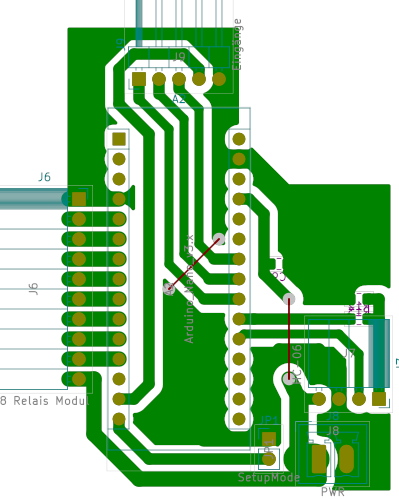
- Controllerboard Selbstbau
- 8-Relais Modul 5V
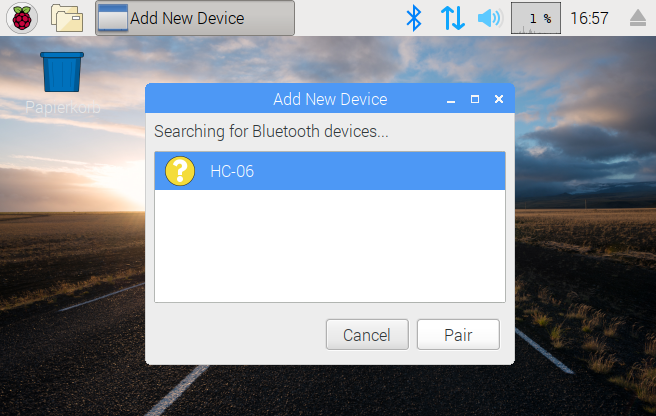
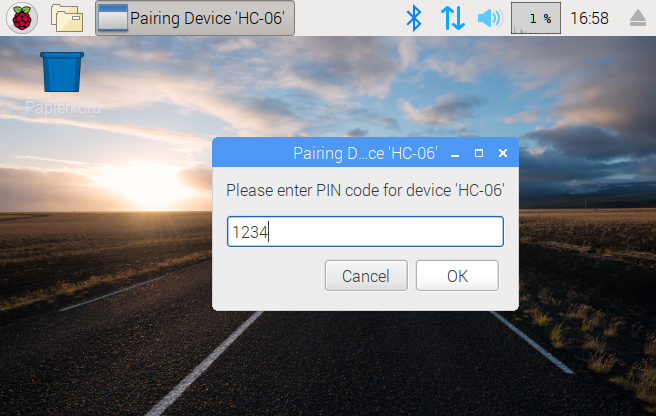
- HC-06 Bluetooth Serieller Transceiver
Verbindung zum Bluetoothmodul herstellen:
Beispieleinstellungen für tholus.ini:
[dome]
SerialPort = /dev/rfcomm0
Address = 00:13:EF:00:10:4C
SerialPort = /dev/rfcomm0
Address = 00:13:EF:00:10:4C
Weiterführende Links:
Bluetooth-Verbinung RPI und Arduino
Bluetooth-Verbindung einrichten
Bluetooth-Verbindung mit RPI 3