Schnittstellenparameter
| Takt | 9600 baud |
| Bytesize | 8 |
| Parität | keine |
| Stopbit | 1 |
Protokoll
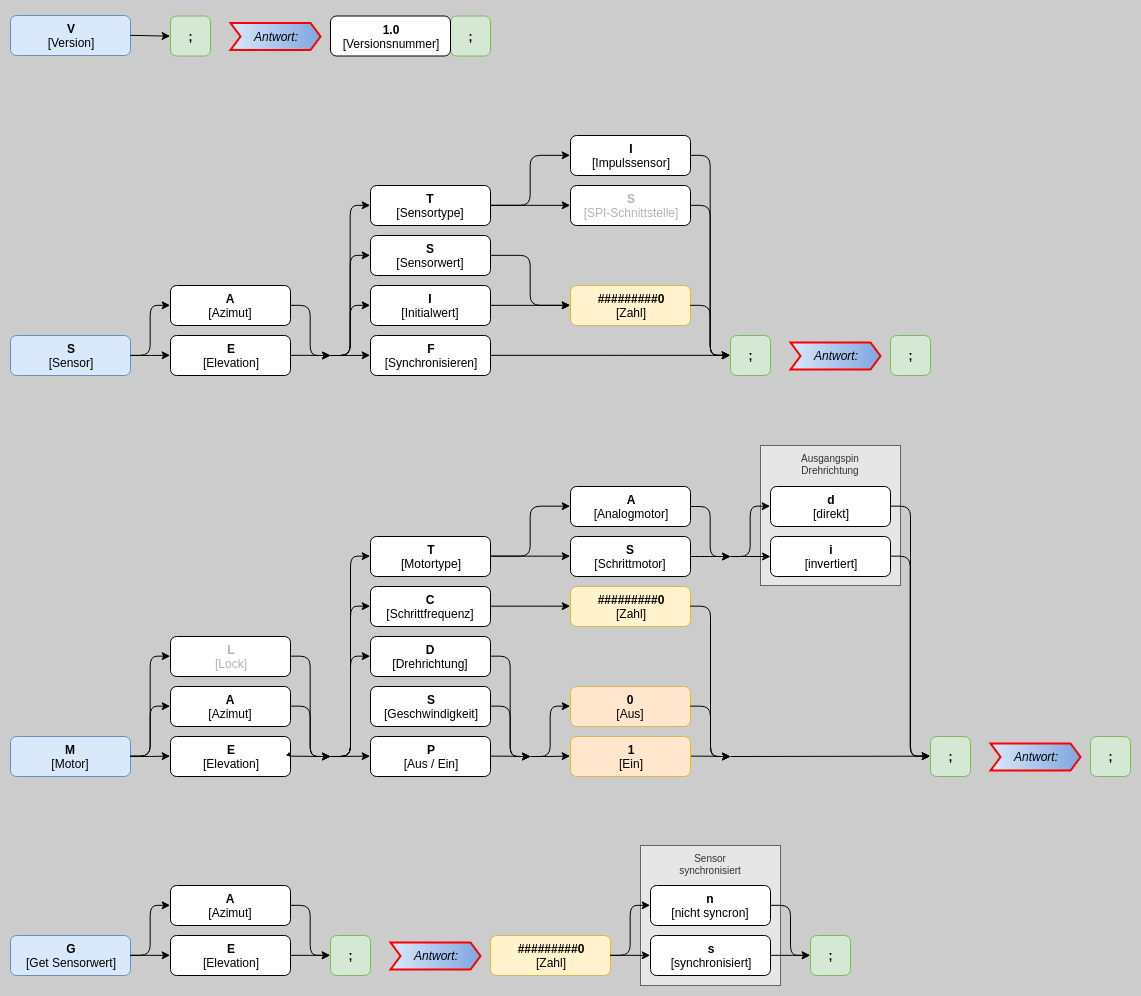
Jedes Komando bzw jede Antwort ist jeweils mit einem ; abgeschlossen.
Parameter in grau werden derzeit noch nicht unterstützt.
Zahlen können Werte zwischen -2.000.000.000 und 2.000.000.000 annehmen. Empfohlen wird ein möglichst kleiner, positiver Wertebereich.
Beispiele
| V; | 0.1; | Liefert die Softwareversion |
| SATI; | ; | Der Sensor an der AZ-Achse ist ein Impulssensor. |
| SETH; | ; | Der Sensor an der EL-Achse ist vom Typ HH-12. |
| SAS1000; | ; | Setzt den Sensorwert an der AZ-Achse auf den Wert 1000. |
| SES-4002001; | ; | Setzt den Sensorwert an der EL-Achse auf den Wert -4002001. |
| MATSi; | ; | Der Motor an der AZ-Achse ist ein Schrittmotor und der Ausgangspin für die Richtung wird invertiert. |
| METAd; | ; | Der Motor an der EL-Achse ist ein Analogmotor und der Ausgangspin für die Richtung wird nicht invertiert. |
| MEC1000; | ; | Setzen der Geschwindigkeit des EL-Schrittmotors. Die Zahl entspricht der Zeit zwischen dem Umschalten des Tacktausgangs in 20μsec Einheiten. 25 entspricht einer Tacktfrequenz von 1kHz, 5 = 5kHz, 250 = 100Hz |
| GA; | 1248n; | Liest den Sensorwert des AZ-Sensors. Der Sensorwert ist 1248. Der Sensor ist noch nicht Synchronisiert. Der Wert entspricht daher nicht der tatsächlichen Position. |
| GE; | -54s; | Liest den Sensorwert des EL-Sensors. Der Sensorwert ist -54. Der Sensor ist bereits Synchronisiert. |